Programmer un robot avec Pick&Place
Voir le Robotics_PickAndPlace.project et Robotics_PickAndPlace_without_Depictor.project exemples de projets dans le répertoire d'installation de CODESYS en dessous de ..\CODESYS SoftMotion\Examples.
le Robotics_PickAndPlace.project et Robotics_PickAndPlace_without_Depictor.project les exemples de projets se trouvent dans le répertoire d'installation ...\CODESYS\Projects\SoftMotion\<version>\Examples. le Robotics_PickAndPlace.project projet nécessite la CODESYS Depictor Package Depictor à installer. Ce projet affiche la cinématique dans une animation 3D. Le projet Robotics_PickAndPlace_without_Depictor.project montre une forme simplifiée de la séquence dans un écran de visualisation.
Ce chapitre ne couvre que les objets qui sont pertinents pour SoftMotion.
L'exemple se compose d'un trépied, d'une table rotative et d'un convoyeur. La cinématique reprend un anneau qui se trouve sur la table rotative. Lors du ramassage, le plateau porte-outils de la cinématique se déplace de manière synchrone avec la table rotative. Ensuite, l'anneau est placé sur un cône situé sur une bande transporteuse. Lors de la pose, la cinématique se déplace de manière synchrone avec la bande transporteuse. Deux boutons sont situés sur l'écran de visualisation pour contrôler la séquence. Lorsque vous appuyez sur le Auto bouton, les anneaux sont déposés automatiquement. Sinon, le Jouer Le bouton apparaît pour vous permettre de placer la bague. | 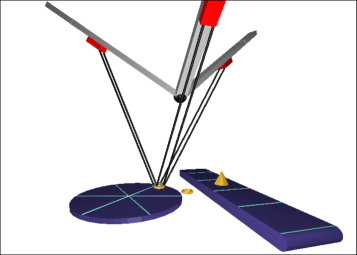 |
Structure du projet
CODESYS SoftMotion Manette
Groupe d'axes Trépied: Le groupe d'axes définit la cinématique et la correspondance avec les axes individuels Trépied1, Trépied2, et Trépied3.
DepictorCalculs (PRG), Environnement (PRG), Anneau (FB): Programmes pour contrôler la séquence complète et la visualisation. Ces POU ne sont pas pertinents pour la compréhension des blocs PLCopen, à l'exception de la définition du système de coordonnées du produit (PCS_1 et PCS_2).
Robot (PRG): Programme de contrôle des séquences de mouvement. Une description détaillée se trouve dans le paragraphe suivant.
Visualisation: Visualisation animée pour clarifier la séquence.
Trépied1, Trépied2, Trépied3: Axes linéaires du trépied.
DriveRotaryTable: Axe pour la table rotative.
Convoyeur à courroie d'entraînement: Axe pour la bande transporteuse.
Structure de la Robot (PRG) programme séquentiel
Les Robot (PRG) programme est exécuté en cycles. A ce stade, les étapes individuelles sont exécutées en fonction de la state. A la fin d'un programme, les appels de tous les blocs fonction utilisés sont prêts pour la commande de mouvement.
Les axes simples du trépied sont activés (blocs fonction
pwA1,pwA2, etpwA3de genreMC_Power).CASE 0: Attendez que les axes participants soient opérationnels.CASE 10: définit les positions de référencement ; dans les applications physiques, le référencement est effectué à cette position (blocs fonctionspA1,spA2, etspA3de genreMC_SetPosition).CASE 20: Placement du système de coordonnées machine dans le système de coordonnées universel (bloc fonctionsetCoordde genreMC_SetCoordinateTransform).CASE 30: Libération du groupe d'axes (bloc fonctionenablede genreMC_GroupEnable.Attendez une réponse indiquant que le groupe d'axes a appliqué toutes les valeurs.
CASE 40àCASE 130: Application Pick&Place : Tous les mouvements sont commandés éventuellement avec plusieurs instancesMC_MoveDirectAbsolute,MC_MoveDirectRelative, etMC_MoveLinearqui sont appelés en cycles. Un front montant auExecutel'entrée de ces POU dans chaque état conduit à émettre une nouvelle commande de mouvement dans laquelle la sortiebCommandAcceptedindique le succès du processus. Une chaîne typique de commandes résulte de l'interrogation de cette sortie avant la prochaine commande de mouvement.
Blocs fonctionnels : MC_TrackConveyorBelt et MC_TrackRotaryTable
le MC_TrackRotaryTable bloc fonction, qui est appelé dans le Ring bloc fonction, est utilisé pour déterminer le PCS_1 système de coordonnées partiel. Ce système de coordonnées est défini lorsqu'un anneau est placé sur la table rotative.
L'origine du système de coordonnées de la table rotative RotaryTableOrigin est le milieu de la table rotative. L'axe Z est l'axe de rotation de la table rotative. Le PCS_1 est tourné autour de l'axe Z du système de coordonnées de la table rotative en fonction de la variable d'entrée RotaryTable. Comme le groupe d'axes se déplace dans PCS_1, il suit la rotation de la table.
Le comportement est similaire au MC_TrackConveyorBelt bloc fonction, qui est appelé dans le Cone bloc fonctionnel. Dans ce cas, le PCS (PCS_2) suit l'axe X du système de coordonnées ConveyorBeltOrigin.